Journal Papers
A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigation
Nan Chen, Fanze Kong, Wei Xu, Yixi Cai, Haotian Li, Dongjiao He, Youming Qin, Fu Zhang
Published on Science Robotics
[Paper]
[Paper_Supplement]
[Youtube]
[Bilibili]
[OpenSource]
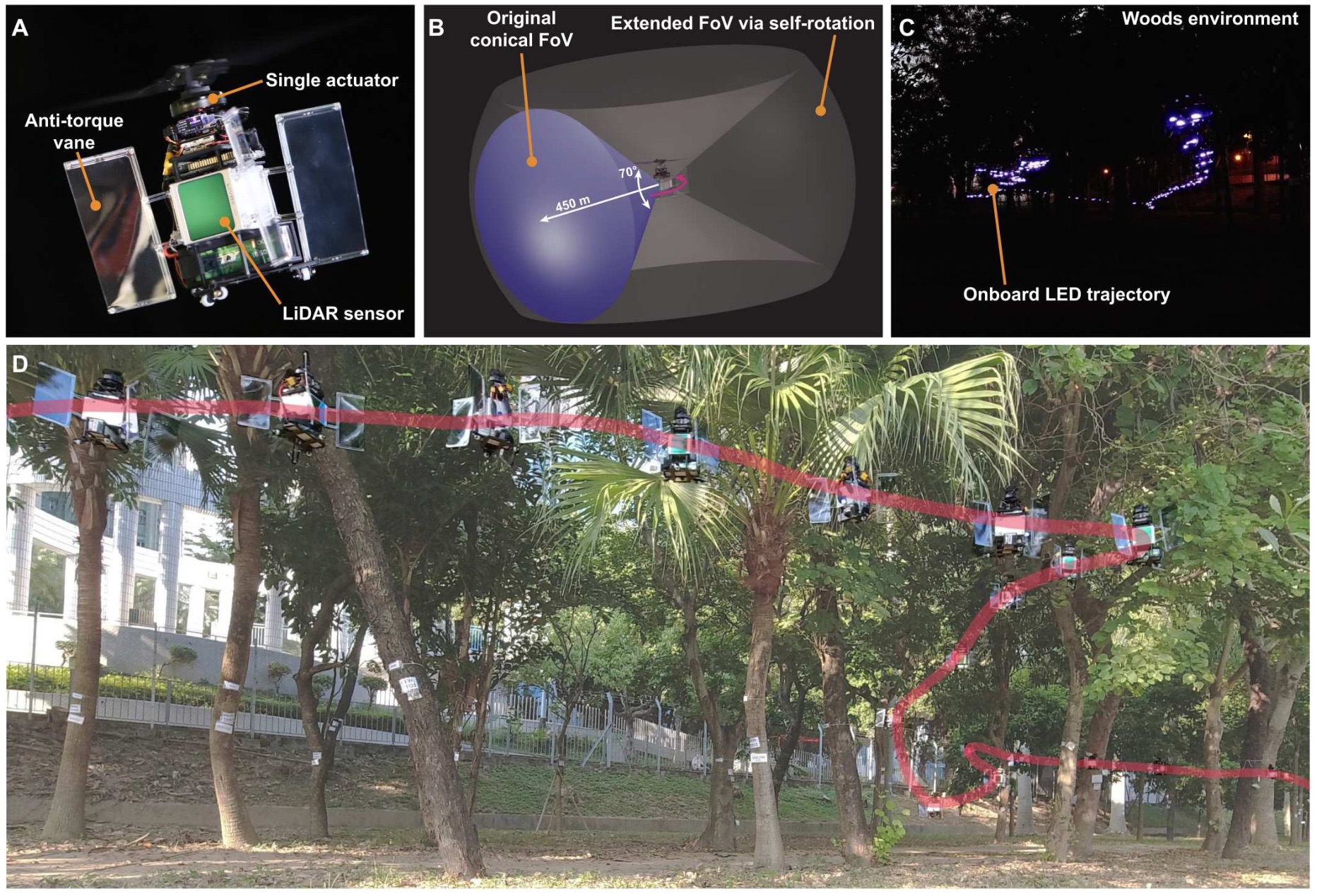
Overview of UAV PULSAR
Selected as a visual feature on the website of Science
Sensorless control of planar switched reluctance motors based on voltage injection combined with core-loss calculation
Nan Chen, Guangzhong Cao, Sudan Huang, Jundi Sun
Published on IEEE Transactions on Industrial Electronics (T-IE)
[Paper]
Gemini II: Design, Modeling, and Control of a Compact Yet Efficient Servoless Bi-copter
Youming Qin*, Nan Chen*, Yixi Cai, Wei Xu, Fu Zhang
Co-first author
Published on IEEE/ASME Transactions on Mechatronics (T-MECH)
[Paper]
[Youtube]
[Bilibili]

Overview of the UAV Gemini II

Best Paper Award Finalist of T-MECH 2023
Snapp: An Agile Robotic Fish with 3D Maneuverability for Open Water Swim
Timothy Ng, Nan Chen, Fu Zhang
Published on IEEE Robotics and Automation Letters (RA-L)
[Paper]
[Youtube]
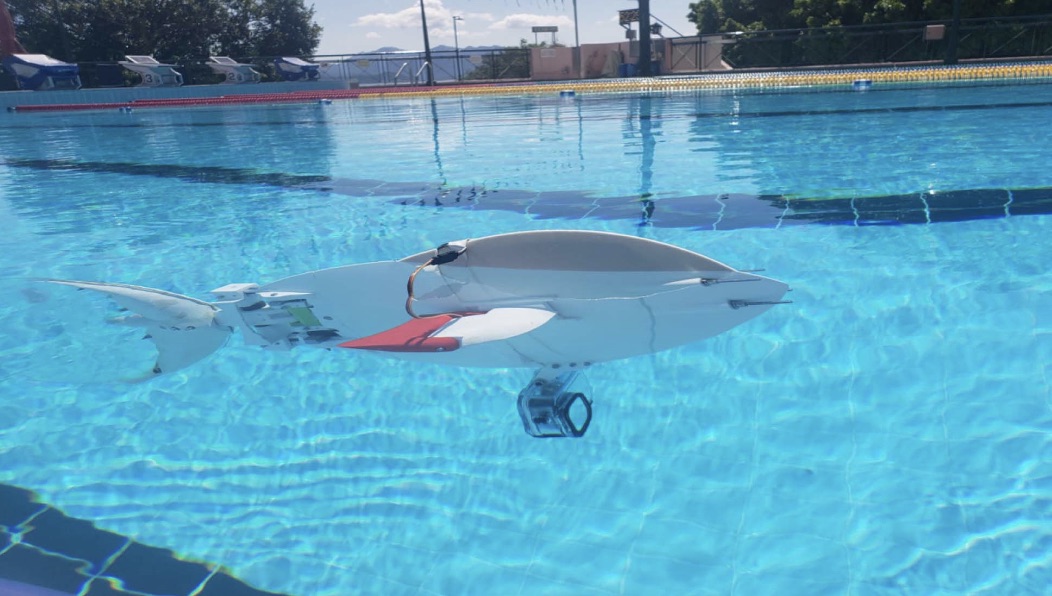
Overview of the robotic fish SNAPP
Nonlinear modeling of the flux linkage in 2-D plane for the planar switched reluctance motor
Guangzhong Cao, Nan Chen, Sudan Huang, Jiangbiao He
Supervisor first author
Published on IEEE Transactions on Magnetics (T-MAG)
[Paper]
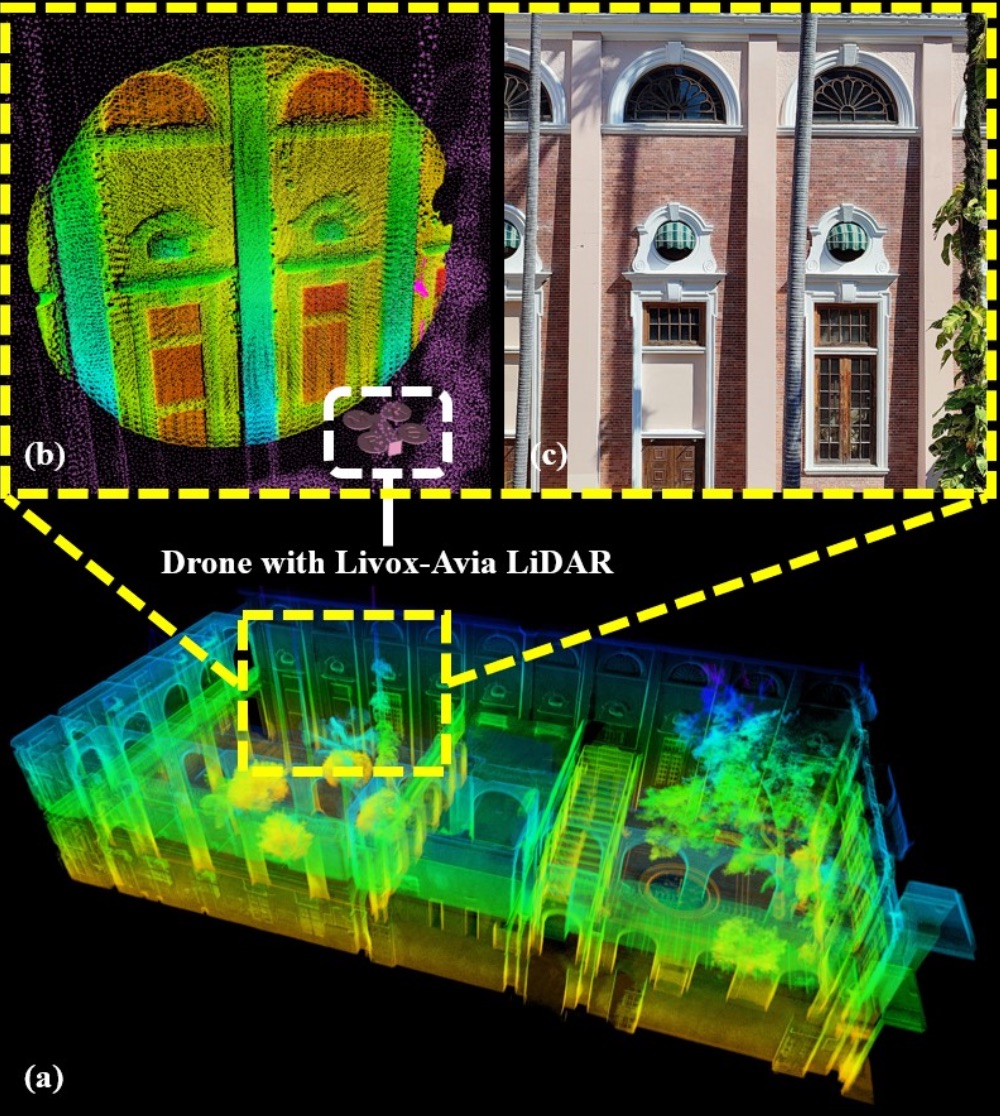
MARS-LVIG dataset: A multi-sensor aerial robots SLAM dataset for LiDAR-visual-inertial-GNSS fusion
Haotian Li, Yuying Zou, Nan Chen, Jiarong Lin, Wei Xu, Chunran Zheng, Xiyuan Liu, Dongjiao He, Fanze Kong, Yixi Cai, Zheng Liu, Shunbo Zhou, Kaiwen Xue and Fu Zhang
Published on International Journal of Robotics Research (IJRR)
[Paper]
[Website]
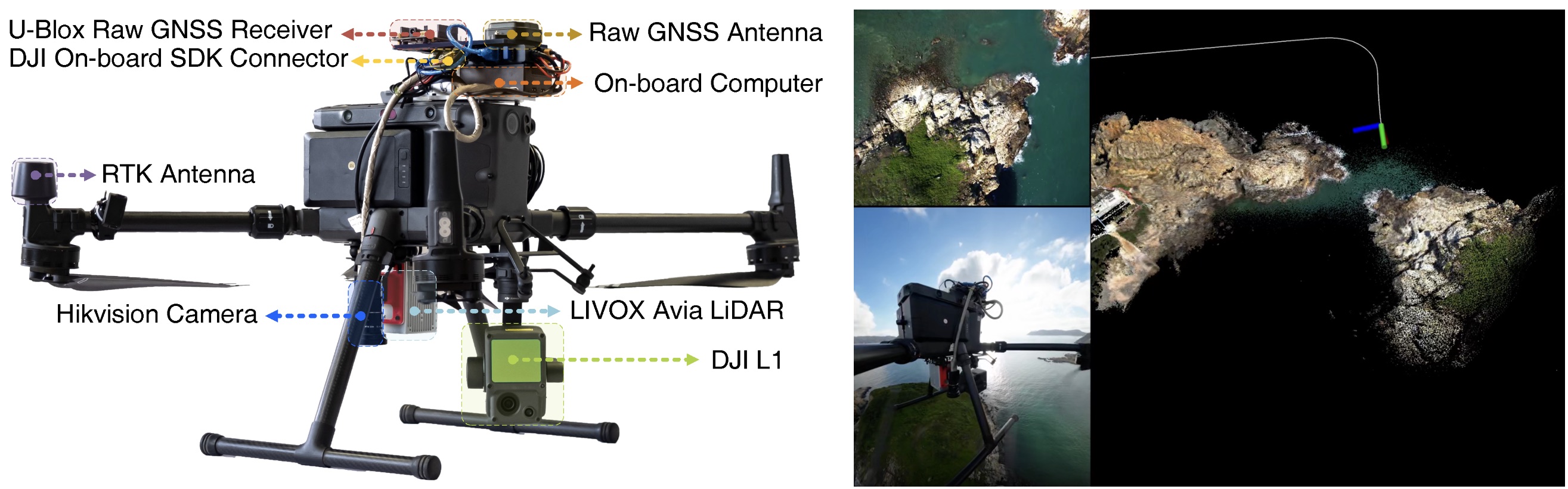
The UAV used for MARS-LVIG dataset
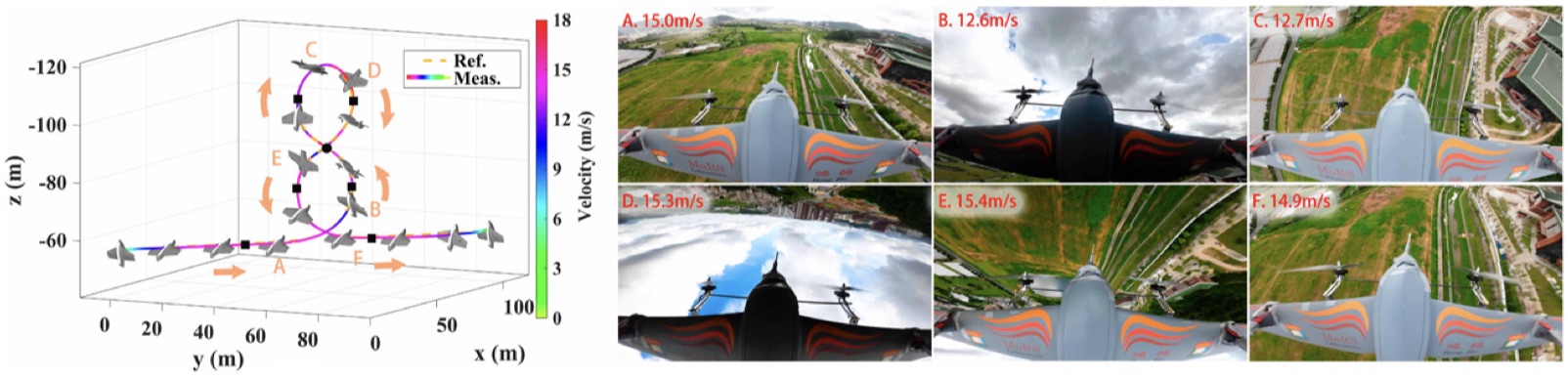
Trajectory Generation and Tracking Control for Aggressive Tail-Sitter Flights
Guozheng Lu, Yixi Cai, Nan Chen, Fanze Kong, Yunfan Ren, Fu Zhang
Accepted on International Journal of Robotics Research (IJRR)
[Paper]
[Youtube]
[Bilibili]

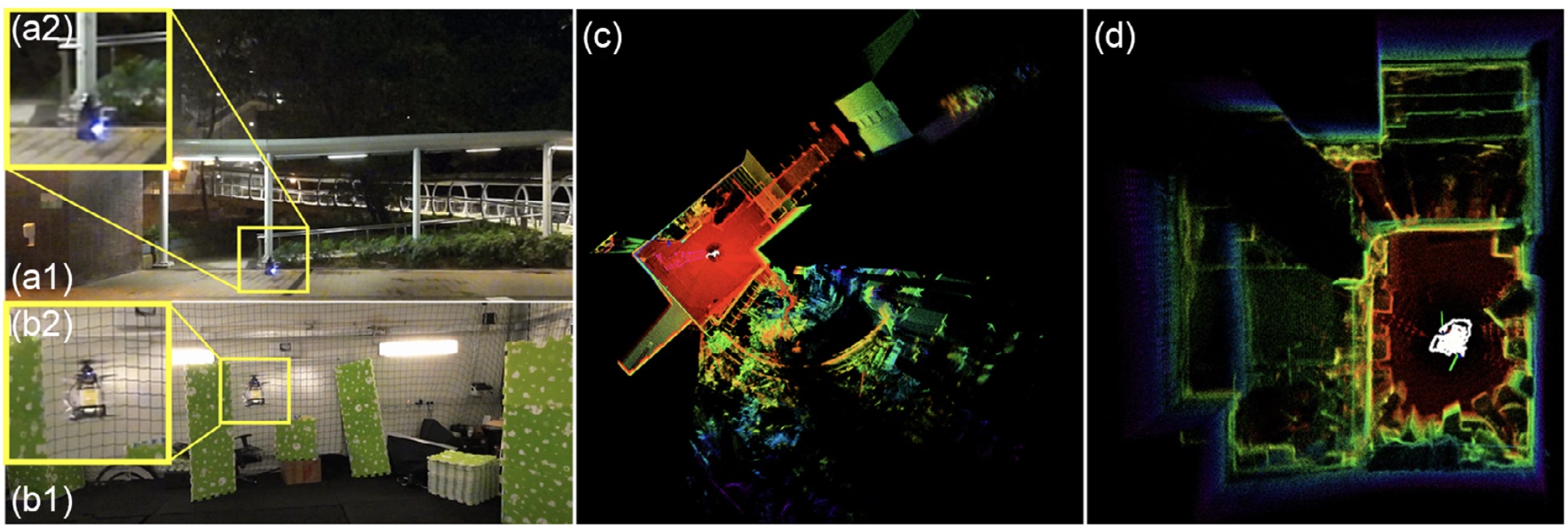
Indoor autonomous flight of UAV Hong Hu
Outdoor autonomous flight of UAV Hong Hu
Point‐LIO: Robust High‐Bandwidth Light Detection and Ranging Inertial Odometry
Dongjiao He, Wei Xu, Nan Chen, Fanze Kong, Chongjian Yuan, Fu Zhang
Published on Advanced Intelligent Systems (AIS)
[Paper]
[Youtube]
[Bilibili]
Mapping under high-speed motion of Point-LIO
MARSIM: A light-weight point-realistic simulator for LiDAR-based UAVs
Fanze Kong, Xiyuan Liu, Benxu Tang, Jiarong Lin, Yunfan Ren, Yixi Cai, Fangcheng Zhu, Nan Chen, Fu Zhang
Published on IEEE Robotics and Automation Letters (RA-L)
[Paper]
[Youtube]
[Bilibili]
A demo of MARSIM
Conference Papers
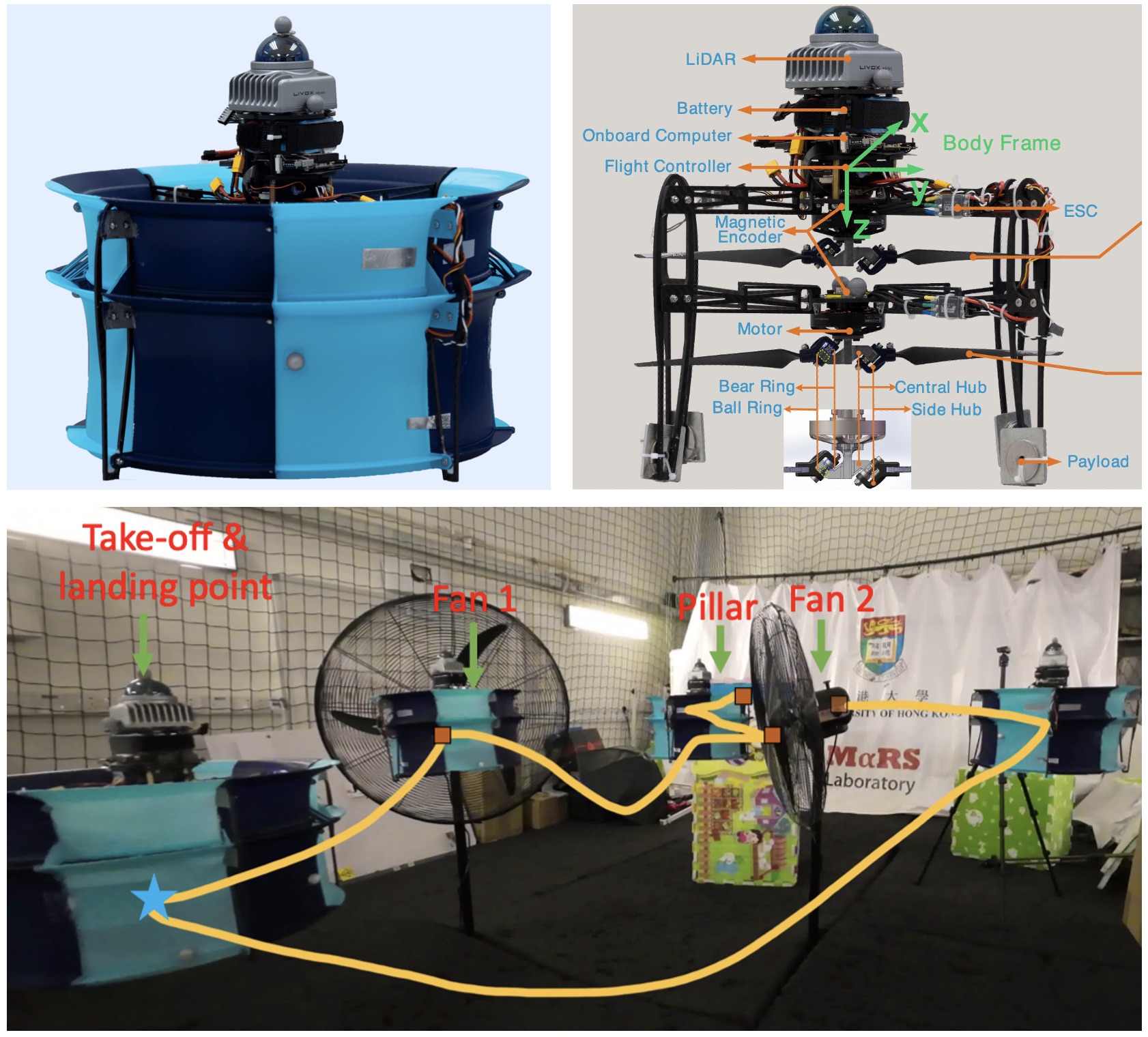
Swashplateless-elevon Actuation for a Dual-rotor Tail-sitter VTOL UAV
Nan Chen*, Fanze Kong*, Haotian Li, Jiayuan Liu, Ziwei Ye, Wei Xu, Fangcheng Zhu, Ximin Lyu, Fu Zhang
Published on 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)
[Paper]
[Youtube]
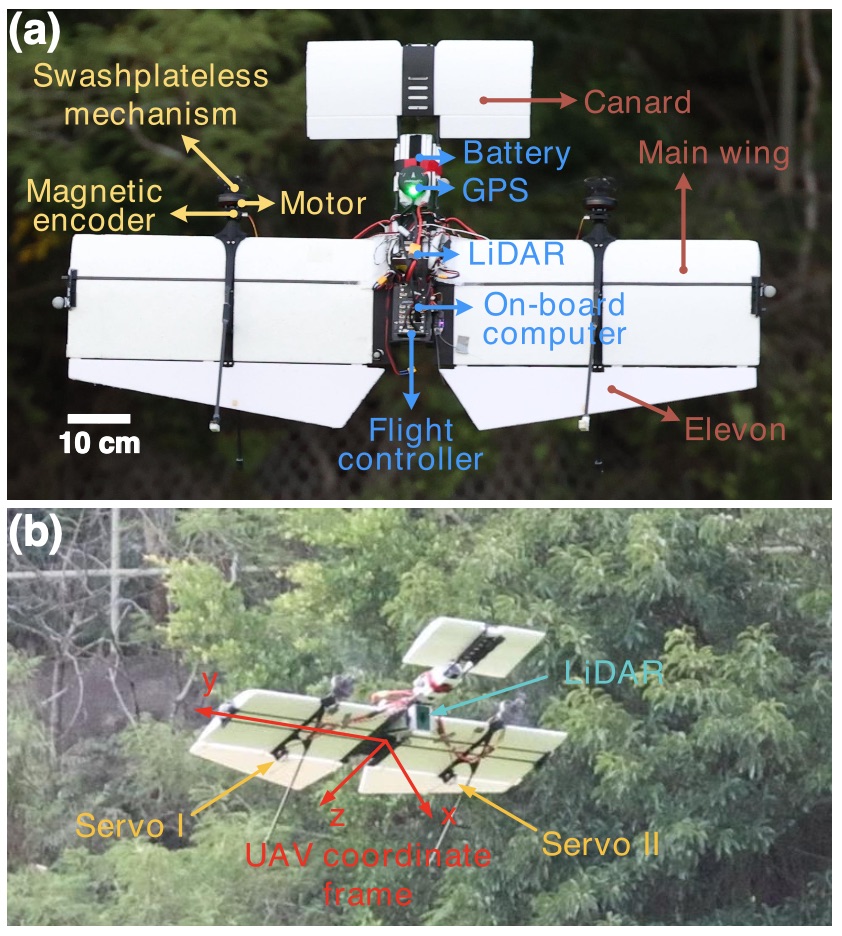
Overview of UAV Hong He
Best Paper Award on Robot Mechanisms and Design & Best Paper Award Finalists in IROS 2023
HALO: A Safe, Coaxial, and Dual-Ducted UAV without Servo
Haotian Li*, Nan Chen*, Fanze Kong, Yuying Zou, Shenji Zhou, Dongjiao He, Fu Zhang
Co-first author
Published on 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)
[Paper]
[Bilibili]
Overview of UAV HALO
Sensorless initial mover position detection of the planar switched reluctance motor using current injection method
Guangzhong Cao, Nan Chen, Sudan Huang
Supervisor first author
Published on 2017 7th International Conference on Power Electronics Systems and Applications-Smart Mobility, Power Transfer & Security (PESA 2017)
Decentralized LiDAR-inertial Swarm Odometry
Fangcheng Zhu, Yunfan Ren, Fanze Kong, Huajie Wu, Siqi Liang, Nan Chen, Wei Xu, Fu Zhang
Published on 2023 International Conference on Robotics and Automation (ICRA 2013)
[Preprint]
[Youtube]
[Bilibili]
Swarm-LIO for localization of UAV swarm system